Hi, I'm Shaun!
I'm a Mechatronics and Biomedical Engineer specializing in industrial automation, machine vision, and hardware systems. I have deep experience with control systems like Allen-Bradley and Mitsubishi, and I'm highly focused on building the bridge between modern high-speed manufacturing and AI.
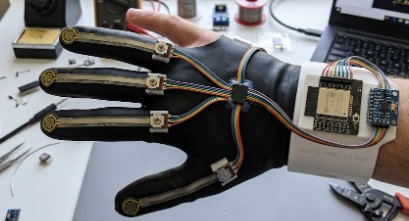
Currently, I'm developing Talon, a wearable 3D spatial control glove. I am a hard worker who dedicates all my effort in getting projects done, end to end with proper documentation, safety and training.
In my free time I enjoy going to the gym, volleyball and playing guitar and volunteering to mentor and teach people.